This document describes the technical architecture and implementation details of Gigaflow.
Gigaflow Architecture
Gigaflow is built as a caching sub-system in the Open vSwitch.
Gigaflow cache in the Open vSwitch (OVS)
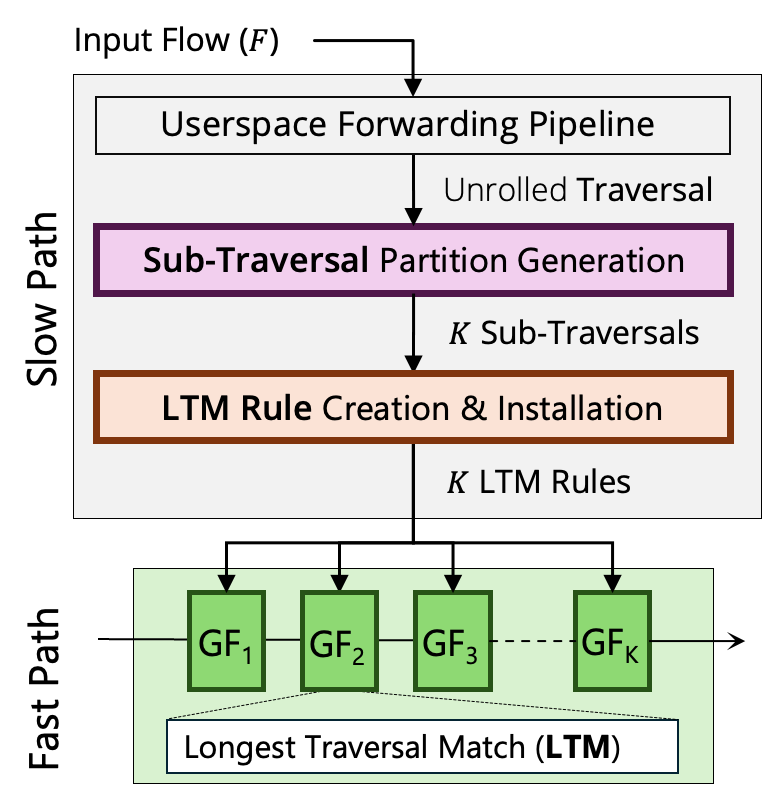
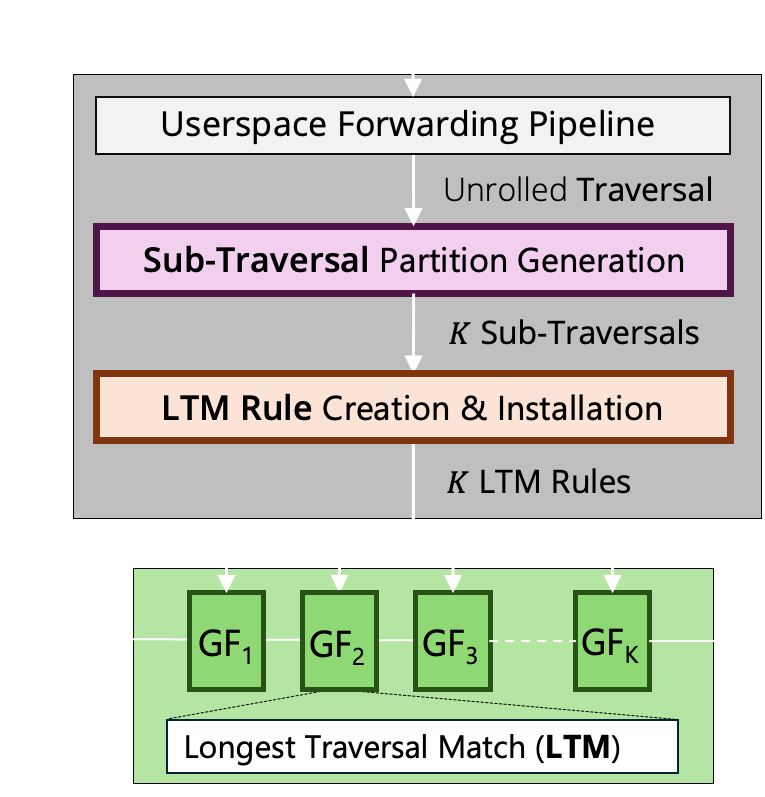
The input packet that misses the cache is sent to the userspace where its flow is extracted (header field set).
The flow passes through the vSwitch pipeline and its traversal is collected.
Then, the travesal mapper, based on disjointedness, captures pipeline-aware locality from this traversal and suggests suitable sub-traversals to be cached.
Finally, Longest Traversal Matching (LTM) cache entries are generated and installed into the Gigaflow table.
Pipeline-Aware Locality
The following figure shows an example of how pipeline-aware locality captures unseen traversals by caching shared sub-traversals. We smartly partition the traversal and determine suitable sub-traversals that have a high likelihood of being reused in the future by other flows.
An example of Gigaflow cache in action with three packets
Disjointedness Property
Capturing pipeline-Aware locality is expensive (see the paper) but we observe the following: disjoint sub-traversals maximize the cross-product rule space in Gigaflow tables. We implement a dynamic program to find disjoint sub-traversals in a given traversal and this algorithm processes the traversal of each cache miss without looking at how previous cache entries were generated.
Gigaflow captures pipeline-aware locality by capitalizing on field-level disjointedness in traversals
Mapping Traversals to Gigaflow
Traversal Processing
The map_traversal_to_gigaflow function is responsible for mapping traversals to Gigaflow tables. It performs the following steps:
Cleanup: Cleans up mapping context before starting the mapping process.
Find Available Tables: Determines available Gigaflow tables with sufficient space for mapping.
Disjointedness Exploration: Implements the dynamic program to explore disjointedness across sub-traversals.
Compose and Map Wildcards: Composes and maps the wildcards as cache entries to the Gigaflow tables.
voidmap_traversal_to_gigaflow(structgigaflow_xlate_context*gf_xlate_ctx,structgigaflow_mapping_context*gf_map_ctx,structgigaflow_perf_stats*gf_stats,structpmd_perf_stats*stats){/* no need to map if there was an error in translation this happens for recursion too deep during resubmissions */if(gf_xlate_ctx->xlate_error!=XLATE_OK){gf_map_ctx->map_out=get_empty_mapper_out();gf_map_ctx->mapped_cnt=0;return;}/* cleanup contexts before we start mapping THIS MUST BE THE FIRST STEP WHEN WE START MAPPING */cleanup_before_mapping(gf_xlate_ctx,gf_map_ctx);/* 1. optimization passes to reduce the number of tables to consider before calling path maximization DP a. decoupling points in traversal? b. header space locality opportunity? c. explore vs exploit? *//* generate bit wildcards and determine available tables for mapping */generate_bit_wildcards(gf_xlate_ctx,gf_map_ctx);find_available_tables_for_mapping(gf_map_ctx,gf_stats);/* 2. find and assign a traversal mapping to Gigaflow tables by maximizing added paths, coupling and other objectives */uint64_toptimizer_cycles=cycles_counter_update(stats);structmapper_out*opt_map_out=maximize_optimality(gf_xlate_ctx,gf_map_ctx);optimizer_cycles=cycles_counter_update(stats)-optimizer_cycles;gf_perf_update_counter(gf_stats,GF_STAT_OPTIMIZER_CYCLES,optimizer_cycles);gigaflow_mapping_ctx_assign_mapping(gf_xlate_ctx,gf_map_ctx,opt_map_out);/* 3. compose and map the wildcards as Gigaflow entries to the accel */uint64_tcompose_cycles=cycles_counter_update(stats);compose_gigaflows(gf_xlate_ctx,gf_map_ctx);compose_cycles=cycles_counter_update(stats)-compose_cycles;gf_perf_update_counter(gf_stats,GF_STAT_COMPOSITION_CYCLES,compose_cycles);/* 4. accept this mapping iff masks are not exceeded in any Gigaflow table */accept_mapping_if_masks_within_limits(gf_map_ctx,gf_stats);constboolestimate_flow_space=gf_map_ctx->gf_config->estimate_flow_space;if(estimate_flow_space){/* 5. add this new mapping to our unique mappings */gigaflow_state_add_new_mapping(gf_xlate_ctx,gf_map_ctx,gf_stats);}}
Exploring Sub-Traversals
The function maximize_optimality_dp implements the disjoint partitioning algorithm as a dynamic program to find the optimal mapping of traversals to Gigaflow tables. It uses memoization to store intermediate results and avoid redundant calculations.
structmapper_out*maximize_optimality_dp(structmapper_memo*memo,structgigaflow_xlate_context*gf_xlate_ctx,structgigaflow_mapping_context*gf_map_ctx,intt_start,intt_end,intg_start,intg_end){/* check memo before making any calls */structdp_memo_entry*dp_cache;dp_cache=search_dp_memo(memo,t_start,t_end,g_start,g_end);if(dp_cache){returndp_cache->map_out;}structmapper_out*map_out=get_empty_mapper_out();/* base case - 1: no more traversal tables to map? */if(t_end==-1){map_out->score=0;// nothing to map..returnmap_out;}/* base case - 2: only one Gigaflow table left? map remaining traversal tables to this Gigaflow table */if(g_end==0){/* get actual Gigaflow table ID before measuring optimality or updating a mapping on that table */intgf_table_id=gf_map_ctx->available_tables[g_end];intscore=get_mapping_optimality(memo,gf_xlate_ctx,gf_map_ctx,t_start+1,t_end,t_end+1,gf_table_id);map_out->score=score;// update this path mapping in mapper_outmapper_out_update_mapping(map_out,t_start+1,t_end,t_end+1,gf_table_id);// insert dp result into memo before returninginsert_into_dp_memo(memo,map_out,t_start,t_end,g_start,g_end,score);returnmap_out;}// recursive callsstructmapper_out*dp_map_out;intmapped_score=0,new_score=0,max_score=0;for(intt_i=t_start;t_i<=t_end;t_i++){dp_map_out=maximize_optimality_dp(memo,gf_xlate_ctx,gf_map_ctx,t_start,t_i,g_start,g_end-1);/* get actual Gigaflow table ID before measuring optimality or updating a mapping on that table */intgf_table_id=gf_map_ctx->available_tables[g_end];mapped_score=get_mapping_optimality(memo,gf_xlate_ctx,gf_map_ctx,t_i+1,t_end,t_end+1,gf_table_id);new_score=dp_map_out->score+mapped_score;/* found a better or equally optimal solution? replace the prior mapping for this table */if(new_score>max_score){// free previous map_out and update to new bestmapper_out_destroy(map_out);// update this path mapping in mapper_out iff t_i+1 <= t_endif(t_i+1<=t_end){mapper_out_update_mapping(dp_map_out,t_i+1,t_end,t_end+1,gf_table_id);}dp_map_out->score=new_score;map_out=dp_map_out;max_score=new_score;}else{// this solution we tried is not any bettermapper_out_destroy(dp_map_out);}}// insert dp result into memo before returninginsert_into_dp_memo(memo,map_out,t_start,t_end,g_start,g_end,max_score);returnmap_out;}
Evaluating a Sub-Traversal
The function that evaluates one sub-traversal to see if all tables overlap is called get_coupling.
intget_coupling(structgigaflow_mapping_context*gf_map_ctx,intt_start,intt_end){constuint32_tcoupling_base_score=gf_map_ctx->gf_config->coupling_base_score;intcoupling=0;// just one wildcard is not a couplinguint16_tnext_wc_bits=EMPTY_WC;uint16_tcurr_wc_bits=gf_map_ctx->bit_wildcards[t_start];for(inti=t_start+1;i<=t_end;i++){next_wc_bits=gf_map_ctx->bit_wildcards[i];/* if either of current or next are empty wildcards OR if not, have common bits, subsume into current and move on */if((curr_wc_bits==EMPTY_WC)||(next_wc_bits==EMPTY_WC)||(curr_wc_bits&next_wc_bits)){curr_wc_bits|=next_wc_bits;coupling+=coupling_base_score;// better coupling}else{/* found decoupling within this range; bad combination */return0;}}returncoupling;}
Putting It All Together
For a given traversal, our disjoint partitioning algorithm tries all sub-traversal combinations and evaluates them for disjointedness using the get_coupling function. The sub-traversal combination with maximum sum of disjointedness is selected for mapping to the Gigaflow tables.